|
Research Interests
|
|
Human movement and robotics and wearable robotics.
|
|
Research Approach
|
|
We integrate theory and experiment work, as we feel it is very important to validate theory with experimental work. We use tools such mechanical modeling, simulation, optimizations, and statistics.
|
|
Current Projects
|
-
Biomechanical work load/Ergonomics agriculture
Agriculture work is known to cause musculoskeletal injuries. This projects aim to reduce the biomechanical work load in peppers and tomatoes that are grown at green houses, and to improve the production rate.


-
Human Locomotion Energetic
During walking and running, mechanical work performed at the lower-limb joints is shared by both muscles and tendons. These dynamic muscle-tendon interactions make it difficult to relate muscle force and work production to the metabolic cost of locomotion. This project aims to: 1) contribute to a muscle-level understanding of the relation between mechanics and metabolic cost of locomotion; (2) provide data to drive more complex computer models of human locomotion; and (3) lead to better designs for wearable robots (e.g. prostheses and exoskeletons).
-
Biomechanical Energy Harvesting
The increasing use of portable electronics, such as mobile phones, prostheses, and laptops, has led researchers to investigate mechanisms for generating electricity by using human body motion. Several biomechanical energy harvesting devices have been developed, but the devices’ underlying mechanisms and their optimal design are not well understood. Our overall aim is to extend this understanding.

-
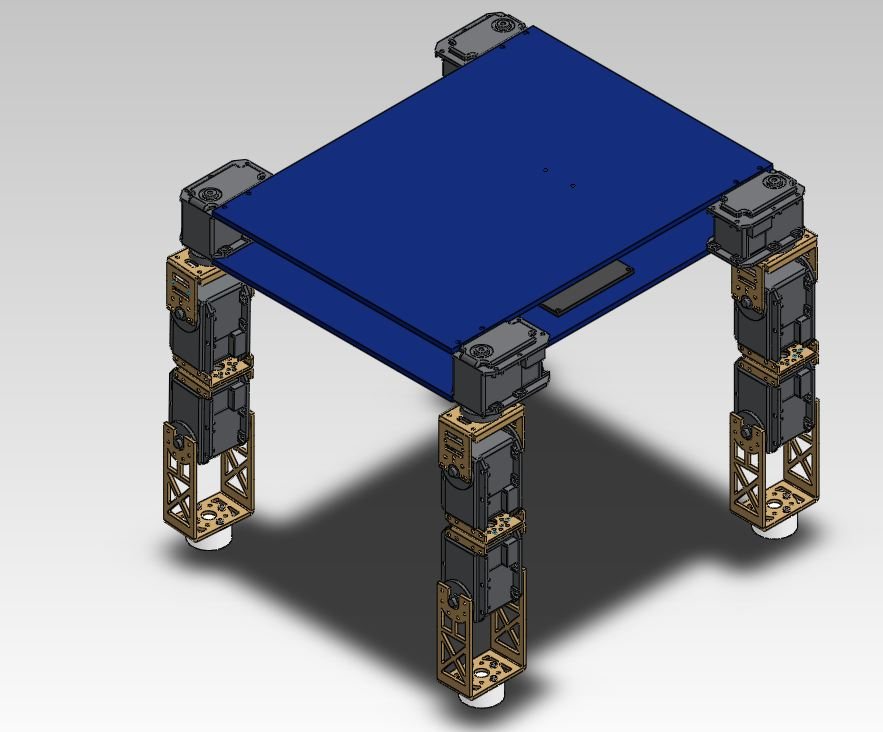
Walking Robots
Driven wheel robots are dominant in manmade locomotors, but their effectiveness is limited to relatively smooth terrains. Therefore, development of walking robots is important, as this will allow locomotion in locations where wheel-driven robots is not possible. The aim of this project is to identify possible locomotion modes for the robot, based on the train and the goal of the robot (maximum speed, minimum energy for distance traveled).

-
Rehabilitation, Human Motion Diagnostics and Corrections of Pathology
This project aim to develop parameters to quantify gait stability, and is performed by applying perturbation during walking and measuring its effect on the human. This project is led by Dr. Itzik Melzer of the Physical Therapy Department at Ben-Gurion University.
|
|